整合更多樣化的傳感器與更加復(fù)雜的實(shí)時(shí)機(jī)械視覺(jué)分析
因自動(dòng)導(dǎo)引車須布署在事先規(guī)劃的環(huán)境,整體布署成本較高,也較難應(yīng)付意外狀況,如運(yùn)輸過(guò)程中一旦遇到障礙物只能暫停運(yùn)作,所以隨著自駕車導(dǎo)航技術(shù)的成熟,擁有自主導(dǎo)引、機(jī)器視覺(jué)、和地圖建構(gòu)能力的自主移動(dòng)機(jī)器人,可自動(dòng)判斷×有效的路徑并繞開(kāi)障礙物。對(duì)于更復(fù)雜的廠房與倉(cāng)儲(chǔ)布局,更需要AMR的越障能力與環(huán)境適應(yīng)性。
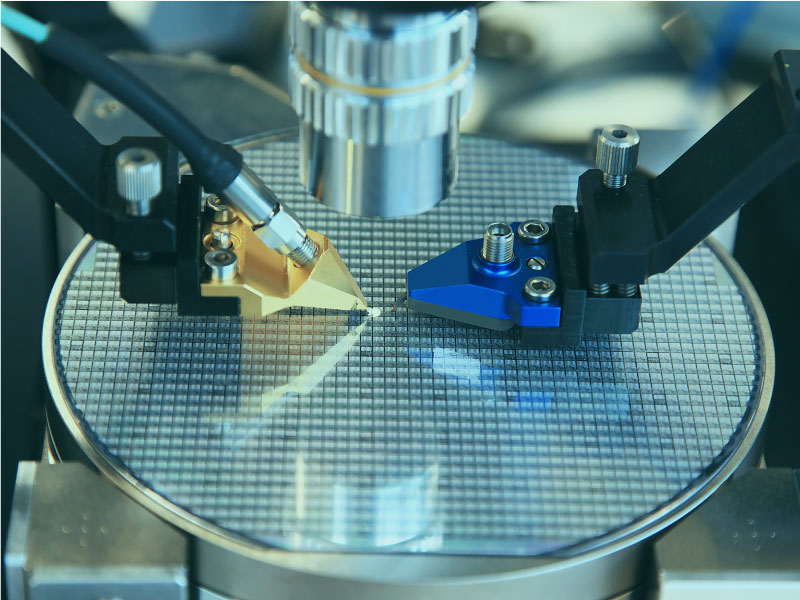
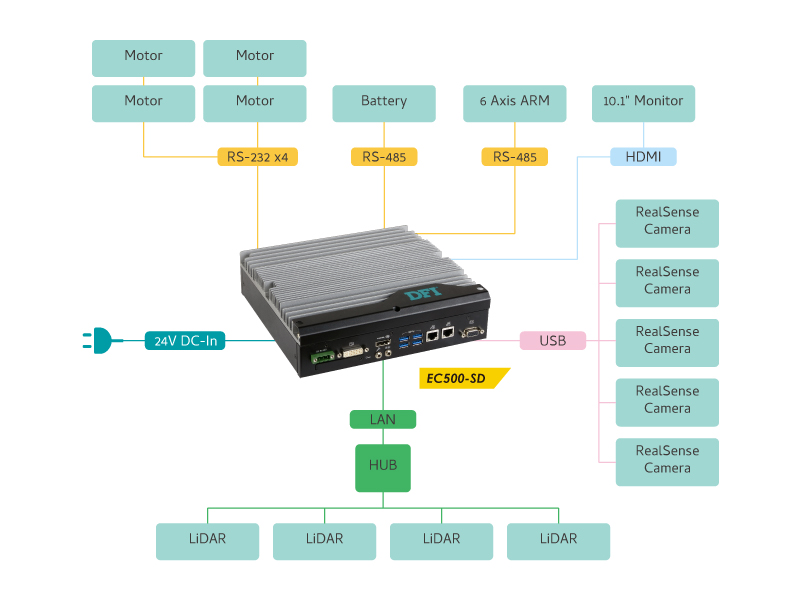
但自主移動(dòng)機(jī)器人需要整合更多樣化的傳感器,包含定位用的深度攝影機(jī)與激光雷達(dá)、防止長(zhǎng)距離碰撞的雷射掃描儀、與偵測(cè)短距離碰撞的超音波傳感器,各類無(wú)線網(wǎng)絡(luò)規(guī)格與控制驅(qū)動(dòng)技術(shù)也是必備的需求。臺(tái)灣某間世界知名的芯片封測(cè)業(yè)者,原本采用的工業(yè)計(jì)算機(jī)方案,遭遇了COM埠和USB埠數(shù)量不足以符合需求,須外接額外控制器的狀況。
此外,除了須完美整合繁雜的傳感器,自主移動(dòng)機(jī)器人須執(zhí)行更加復(fù)雜的實(shí)時(shí)機(jī)械視覺(jué)分析,以及同時(shí)定位與環(huán)境地圖建立 (SLAM, Simultaneous Localization and Mapping) 算法,也需要客制化應(yīng)用程序界面 (API, Application Programming Interface) 和更高的操作系統(tǒng)整合度,確保滴水不漏的兼容度,并發(fā)揮×大的執(zhí)行效能。×后,因晶圓封測(cè)業(yè)者的產(chǎn)線作業(yè)需求,須安裝工業(yè)用顯示器,這也意味著需要來(lái)自工業(yè)計(jì)算機(jī)廠商的系統(tǒng)整合服務(wù) (SI, System Integration),以便打造出設(shè)計(jì)×完善的新型自主移動(dòng)機(jī)器人。